Microcontroller Programming
Bridging C++ logic with physical hardware: From basic LEDs to a piezo-activated vehicle.
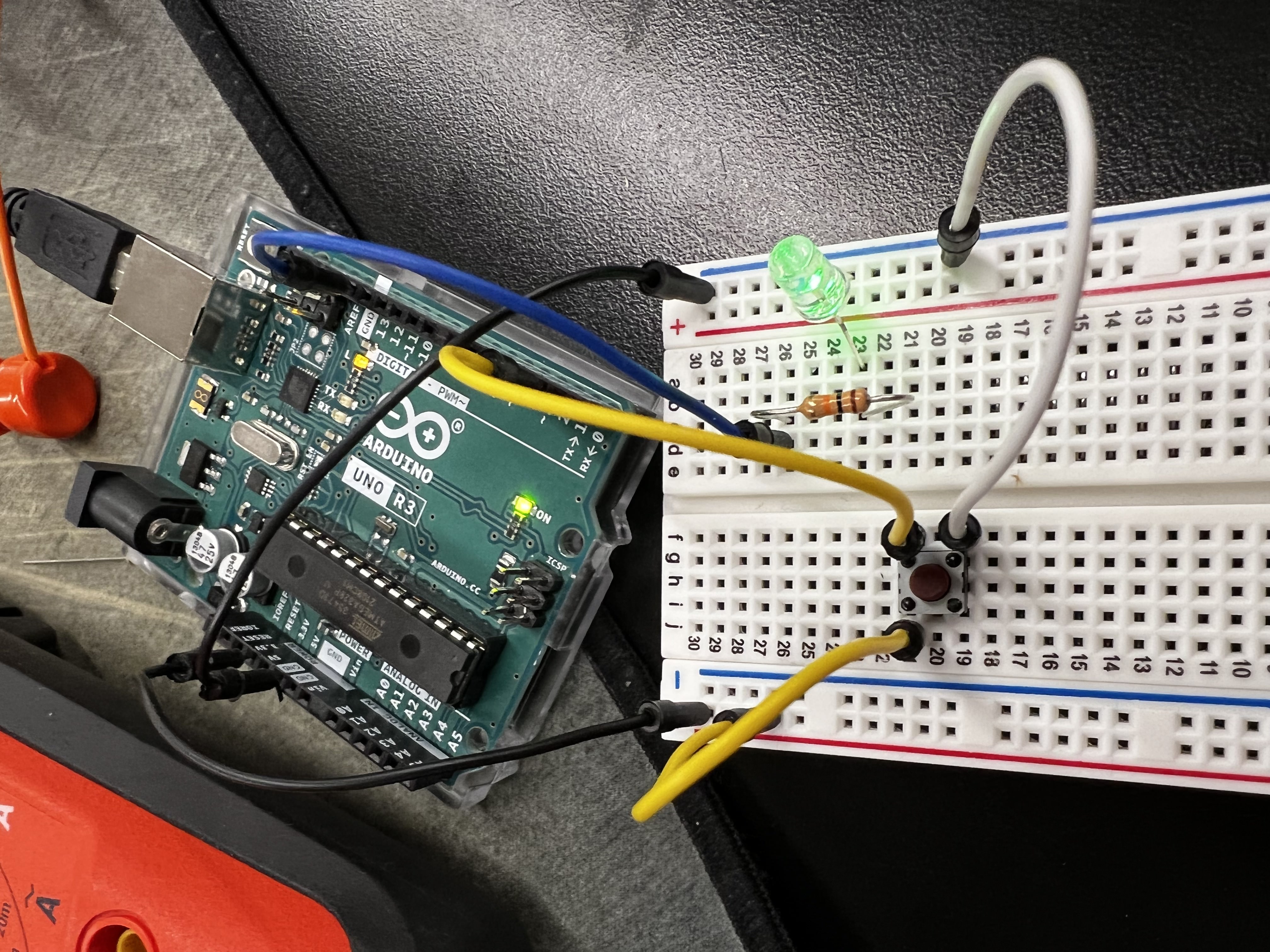
Hello, World!
My first interaction with microcontrollers. A simple logic gate: if button press == true, then LED = ON.
L9110 Motor Driver
Moving to higher loads. Using an external driver to interface the Arduino with a DC motor via PWM pins 3 and 4.
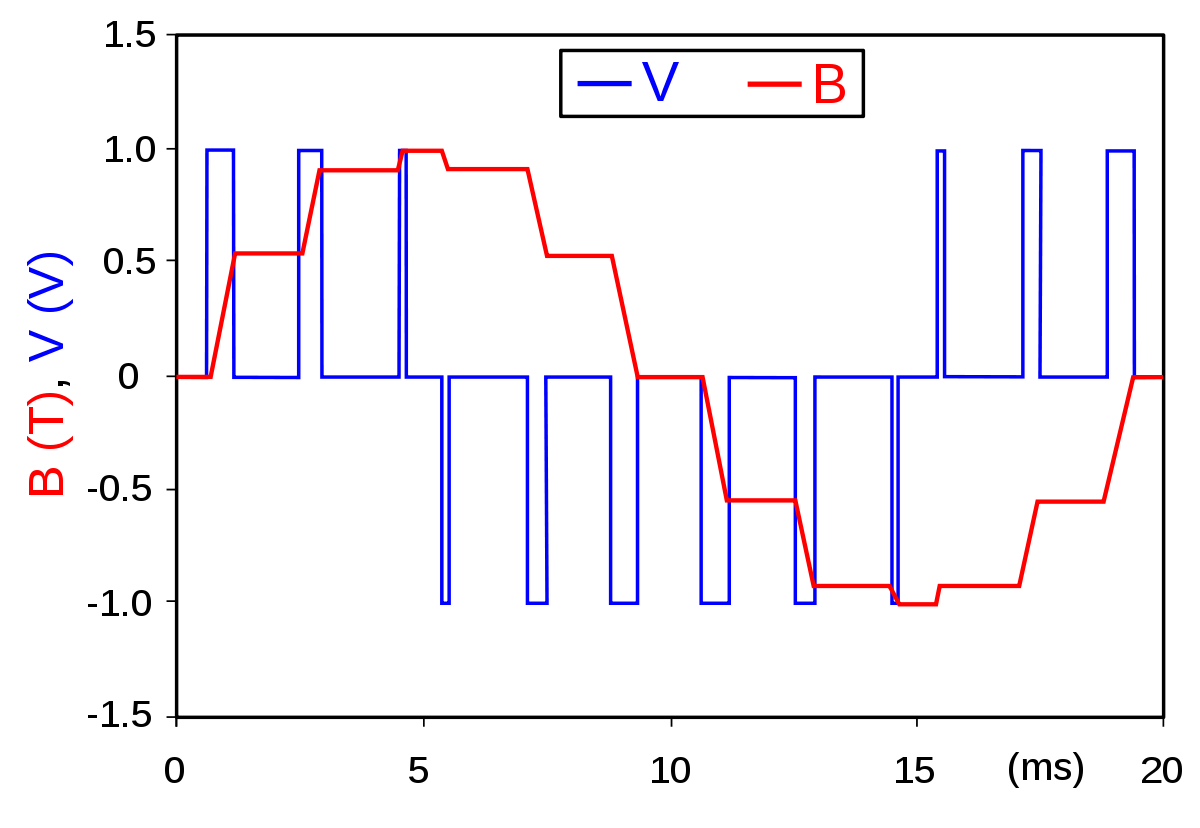
Pulse Width Modulation (PWM)
PWM is a method of reducing the average power delivered by an electrical signal. By chopping the signal into discrete "on" and "off" parts, we can simulate analog voltage.
Application: This allows us to control motor speed or LED brightness, rather than just having them fully On or Off.
First Attempt: The "Clapper"
Using a Piezo sensor to trigger an LED.
.png)
const int piezo = 0;
const int LED = 13;
void setup() {
pinMode(LED, OUTPUT);
}
void loop() {
// Threshold check
if (analogRead(piezo) >= 5) {
digitalWrite(LED, HIGH);
delay(5000);
digitalWrite(LED, LOW);
} else {
digitalWrite(LED, LOW);
}
}
Evolution of Design
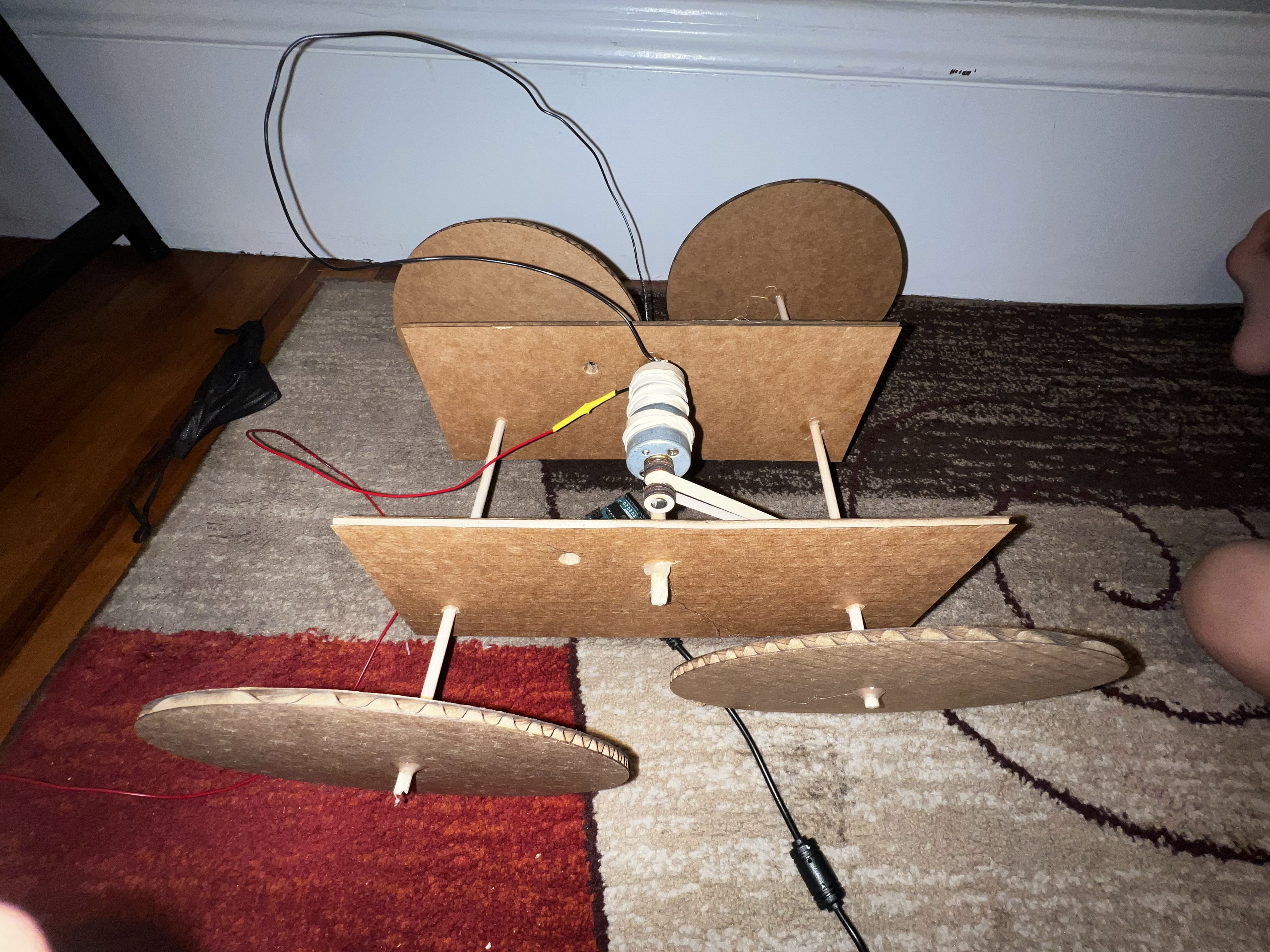
Prototype v1: Failed (Low Torque)
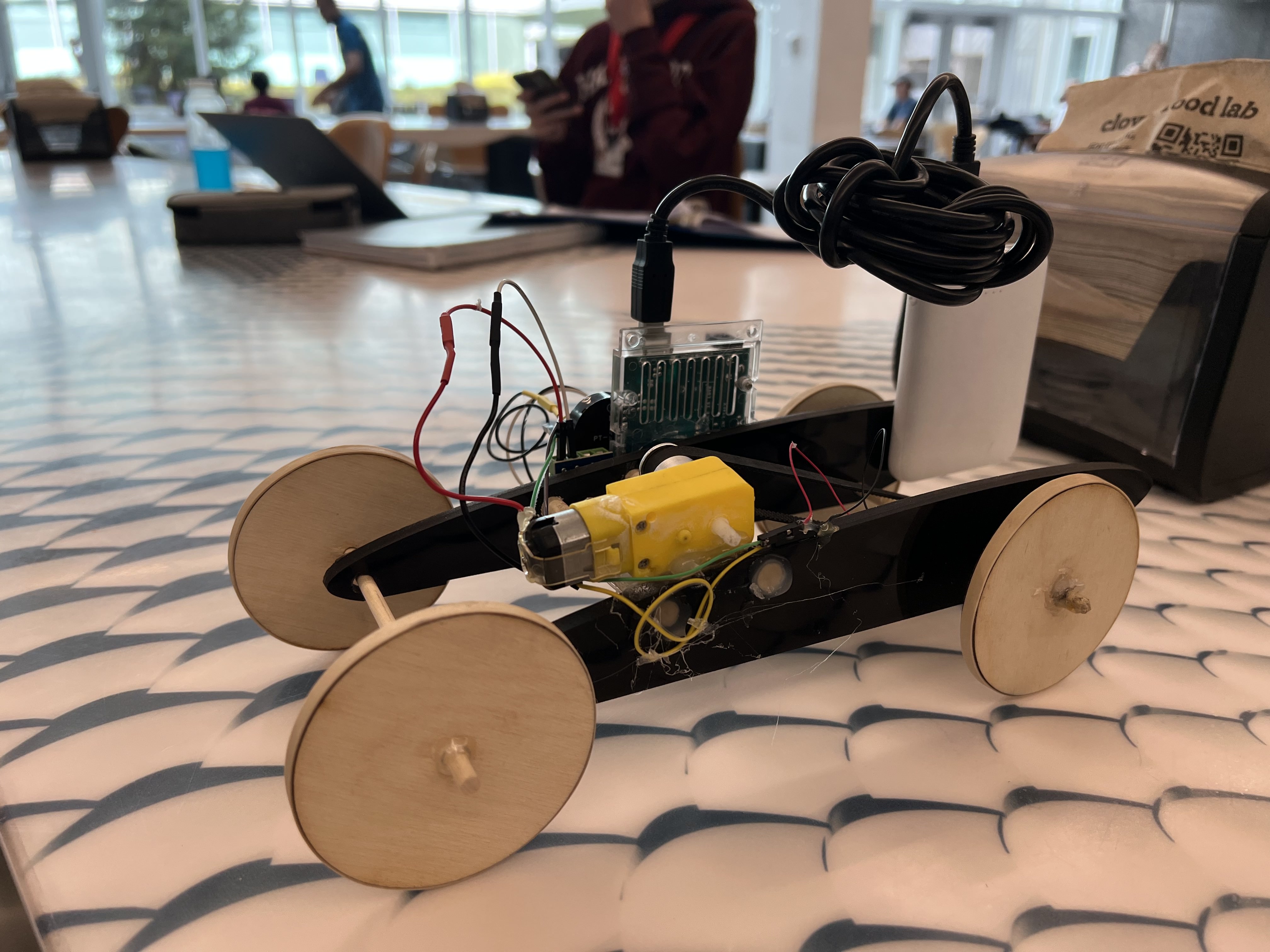
Final Design: Geared Motor
"RPM ≠ Power." My first attempt failed because the motor lacked torque. Adding a gearbox transformed that speed into the torque needed to move the vehicle.
Final Result: The Piezo Vehicle
A car activated by physical impulses (taps/claps).
Optimization
I spent time benchmarking loop structures. While it looks verbose, manually constructing the loop using a while(1) with a break condition proved slightly faster in runtime execution during my 15 tests than a standard for loop.
Standard Approach:
for (int i=0; i<2; i++) { ... }My Optimized Approach:
while(1) { if(i==2) break; ... }
const int PIEZO_PIN = A0;
const int MOTOR_A = 3;
const int MOTOR_B = 4;
const int BUZZER = 8;
int triggerCount = 0;
void setup() {
pinMode(BUZZER, OUTPUT);
pinMode(MOTOR_A, OUTPUT);
pinMode(MOTOR_B, OUTPUT);
analogWrite(MOTOR_A, 0); // Ensure motor starts off
Serial.begin(115200);
}
void loop() {
while (1) {
// Threshold check: Reading > 20
// Toggle Logic: Even counts = ON, Odd counts = OFF
if (analogRead(PIEZO_PIN) >= 20 && (triggerCount % 2) == 0) {
analogWrite(MOTOR_A, 255); // Motor Full Speed
// Audio Feedback Loop
int i = 0;
while (1) {
tone(BUZZER, 445);
delay(200);
noTone(BUZZER);
if (i == 2) break; // Optimized break condition
i++;
}
triggerCount++; // Increment state
delay(500); // Debounce
} else if (analogRead(PIEZO_PIN) >= 20 && (triggerCount % 2) != 0) {
analogWrite(MOTOR_A, 0); // Motor Stop
triggerCount++;
delay(500); // Debounce
}
}
}