Machine Building & End Effectors
Converting rotational motion to linear actuation: Building a wireless smart lock with stepper motors.
Why Stepper Motors?
Unlike standard DC motors, stepper motors move in precise, discrete steps. This allows for high holding torque and excellent positional accuracy without external feedback sensors—perfect for 3D printers, CNCs, and precision actuators.
Basic Control & Acceleration
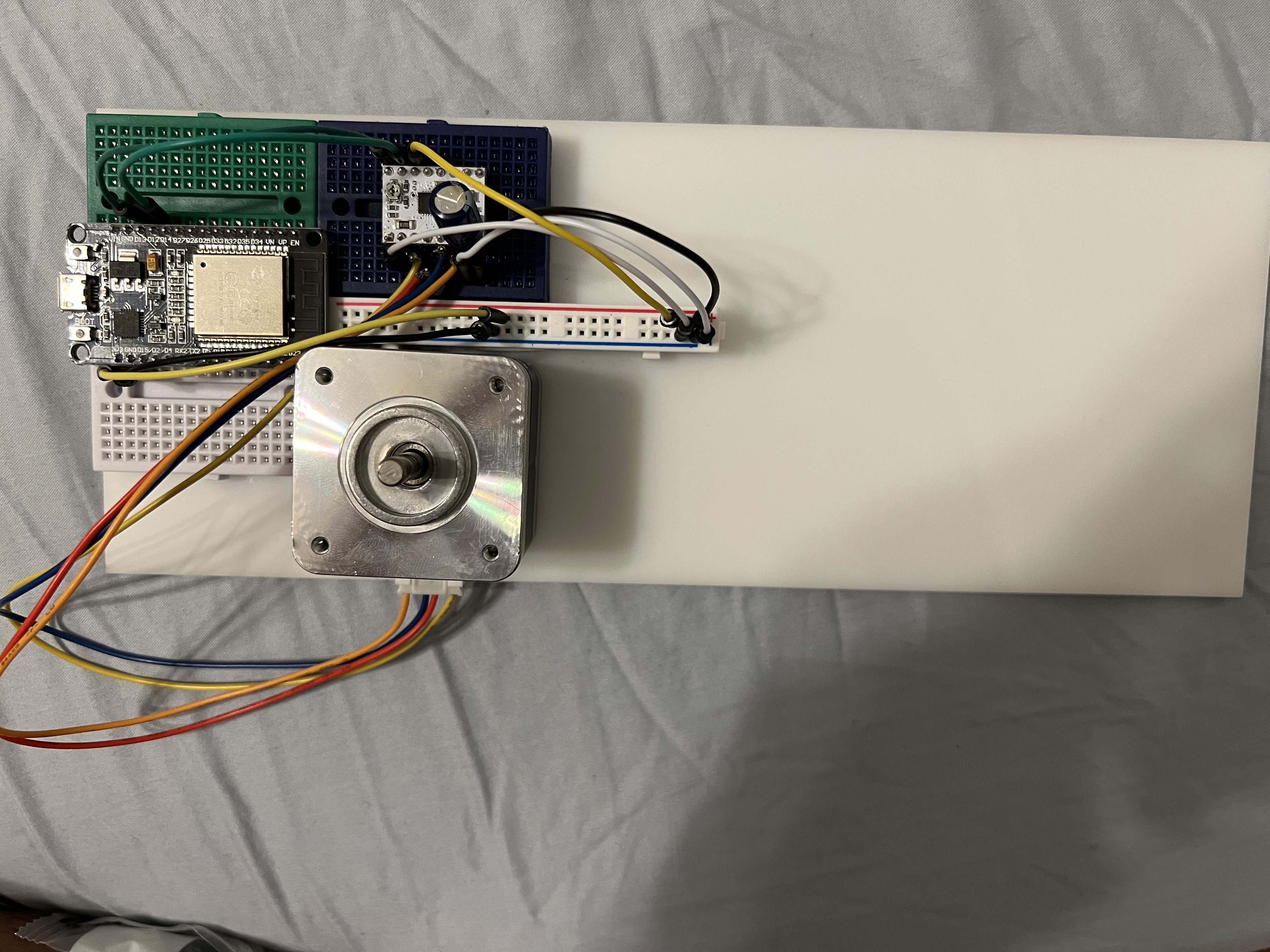
Testing the DRV8834 Driver
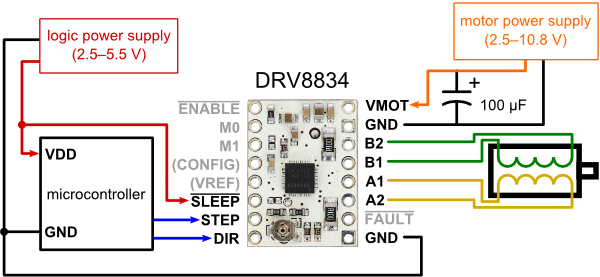
DRV8834 Wiring Diagram
#include <AccelStepper.h>
const int stepPin = 13;
const int dirPin = 12;
// Init AccelStepper for 2-wire board
AccelStepper stepper(1, stepPin, dirPin);
void loop() {
if (stepper.distanceToGo() == 0) {
// Randomize movement profile
delay(1000);
stepper.moveTo(rand() % 1000);
stepper.setMaxSpeed((rand() % 1000) + 1);
stepper.setAcceleration((rand() % 1000) + 1);
}
stepper.run();
}
Mechanism Research
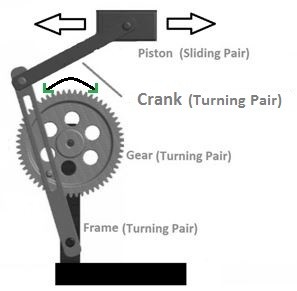
To build a door lock (deadbolt), I needed to convert the stepper's rotational motion into linear motion. I evaluated several mechanical linkages:
Slider Crank
Scotch Yoke
Slotted Lever
Cam & Follower
Rack & Pinion
Chosen Mechanism: Cam & Follower for its simplicity, strength, and precise locking action.
Project: IoT Smart Lock
Wireless Deadbolt Actuator
Fabrication
I 3D printed a custom cam follower and mounted the stepper assembly onto a base plate.
Calibration & Logic
Steps Per Revolution: Through experimentation, I found that 180 steps yielded the optimal linear throw for the deadbolt.
Homing: On startup, the motor moves 220 steps to ensure the lock defaults to an open/safe state in case of power loss.
// Full Rotation (360 degrees) loop
for (int i = 0; i < 800; i++) {
digitalWrite(stepPin, LOW);
delay(1);
digitalWrite(stepPin, HIGH);
delay(1);
}
Homing Sequence
Lock Actuation
Full IoT Integration
Connecting back to the previous IoT unit, I integrated the lock with a web interface and the SMS alert system. This allows me to view the security camera feed and remotely lock/unlock the door via text message links.